This is the repository of Robotic Arm Motion Planning Simulation Based on Reinforcement Learning.
Overview
In this code, I use a self-built pybullet robot arm reinforcement learning environment to test some reinforcement learning algorithms, including DDPG, TD3, DADDPG, DATD3, and DARC, and try to let the robot arm finish three tasks: reach, push, and pick.
I use main.py to run results, the algorithms' parameters are in config.py, and use visdom to monitor the algorithms' performance. The envs deposits three self-built robot arm environments, the algo deposits test algorithms, the models deposits robot urdf file, and the utils deposits small tools for rl-learning.
Requirements
- python : 3.7.11
- mujoco_py : 2.1.5
- torch : 1.6.0+cu101
- gym : 0.19.0
- pybullet : 3.0.6
- visdom : 0.1.8.9
Test algorithm
- DDPG
- TD3
- DADDPG
- DATD3
- DARC(AAAI 2022, Efficient Continuous Control with Double Actors and Regularized Critics )
How to use
Start visdom
python -m visdom.server
Run simulation
python main.py run --env= --algo= --vis_name=
I use fire console to run my code, so use the following commands to run the simulation, you also can change the config in config.py instead.
Some results
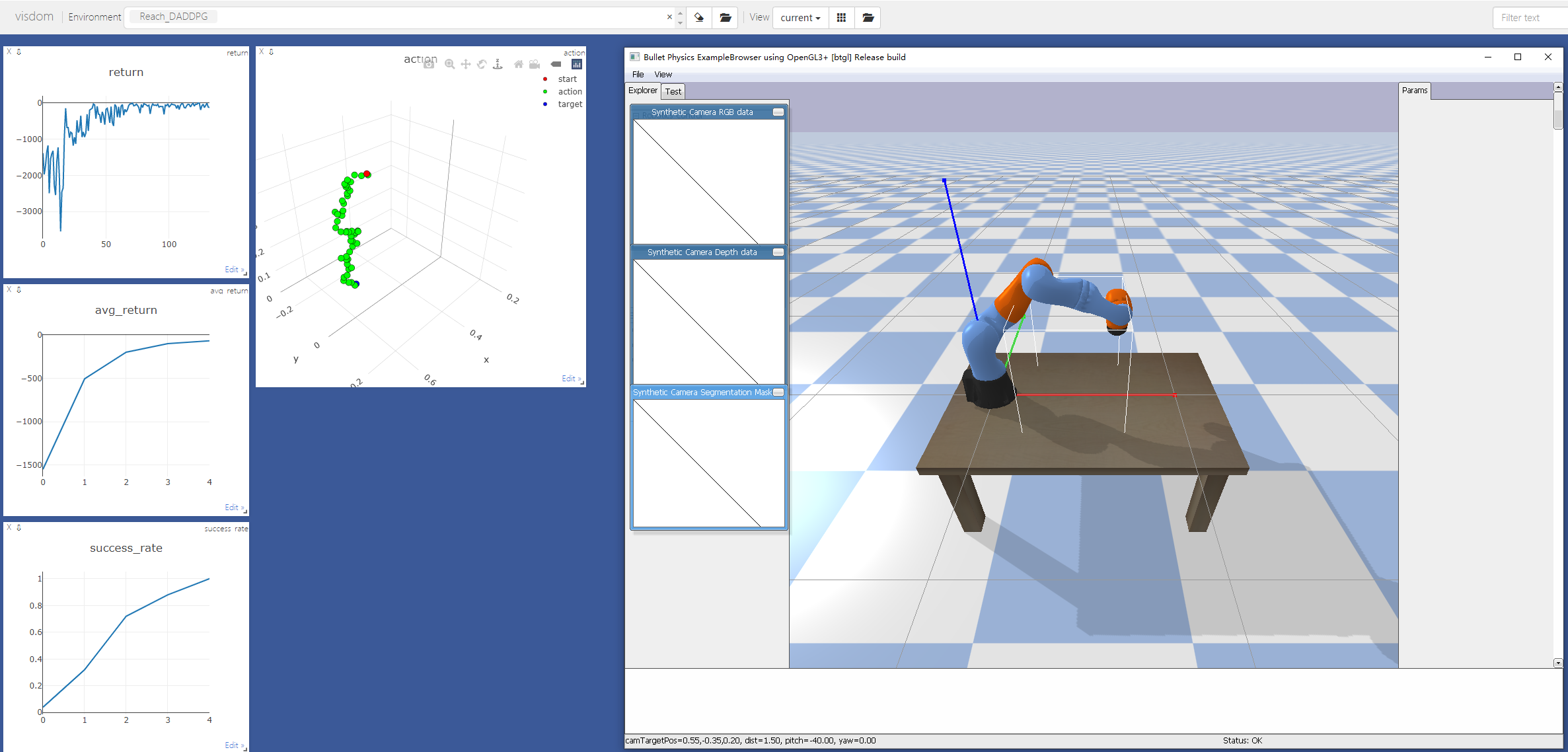
Training process
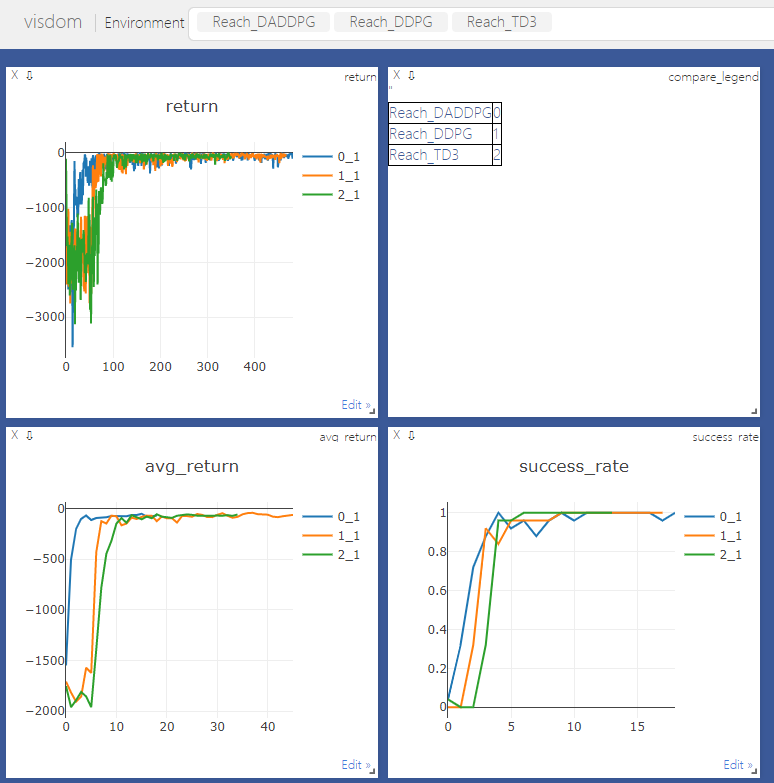
Performance
Online comparison