This is the repository of garbage classification using yolov5.
Overview
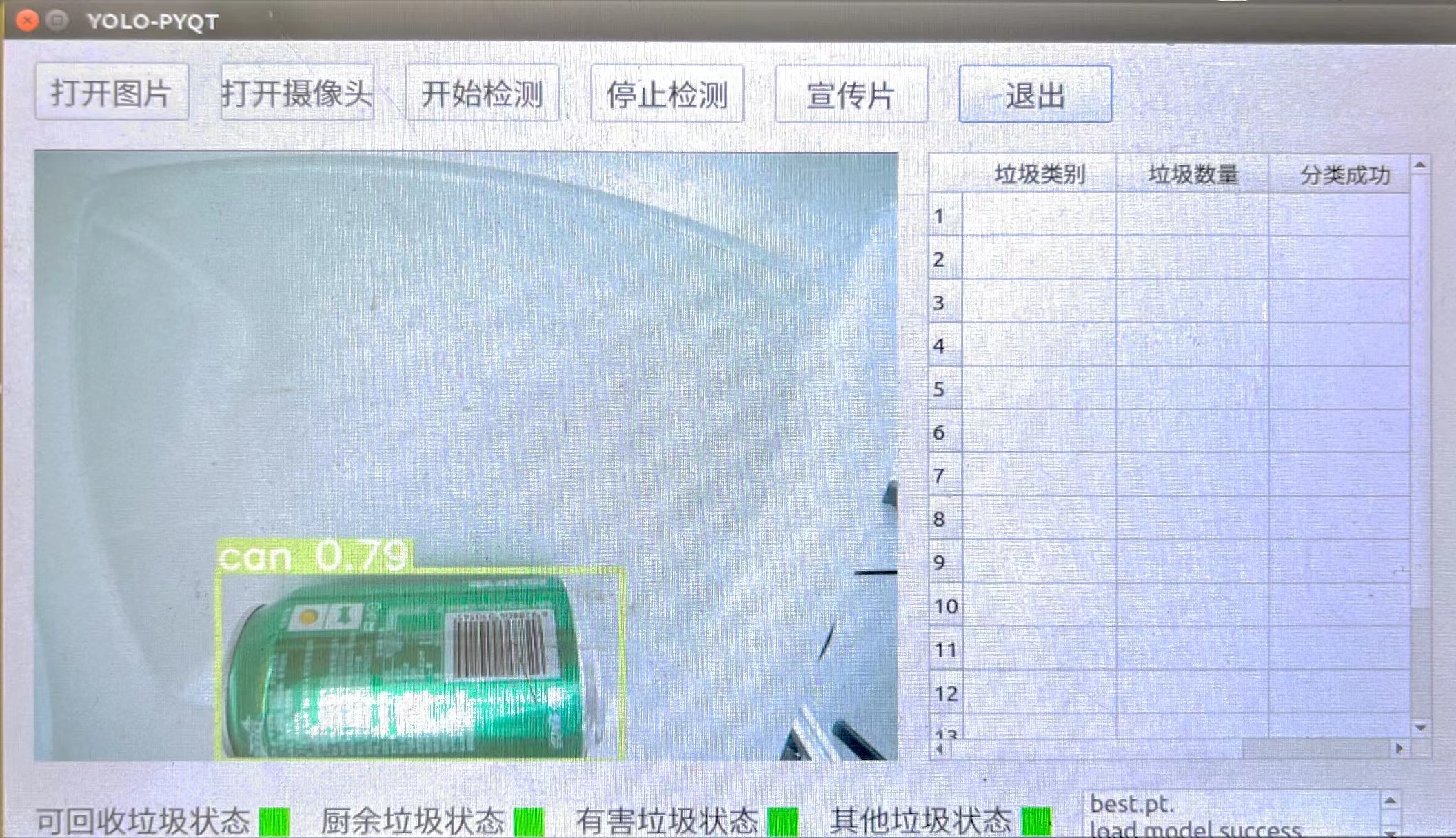
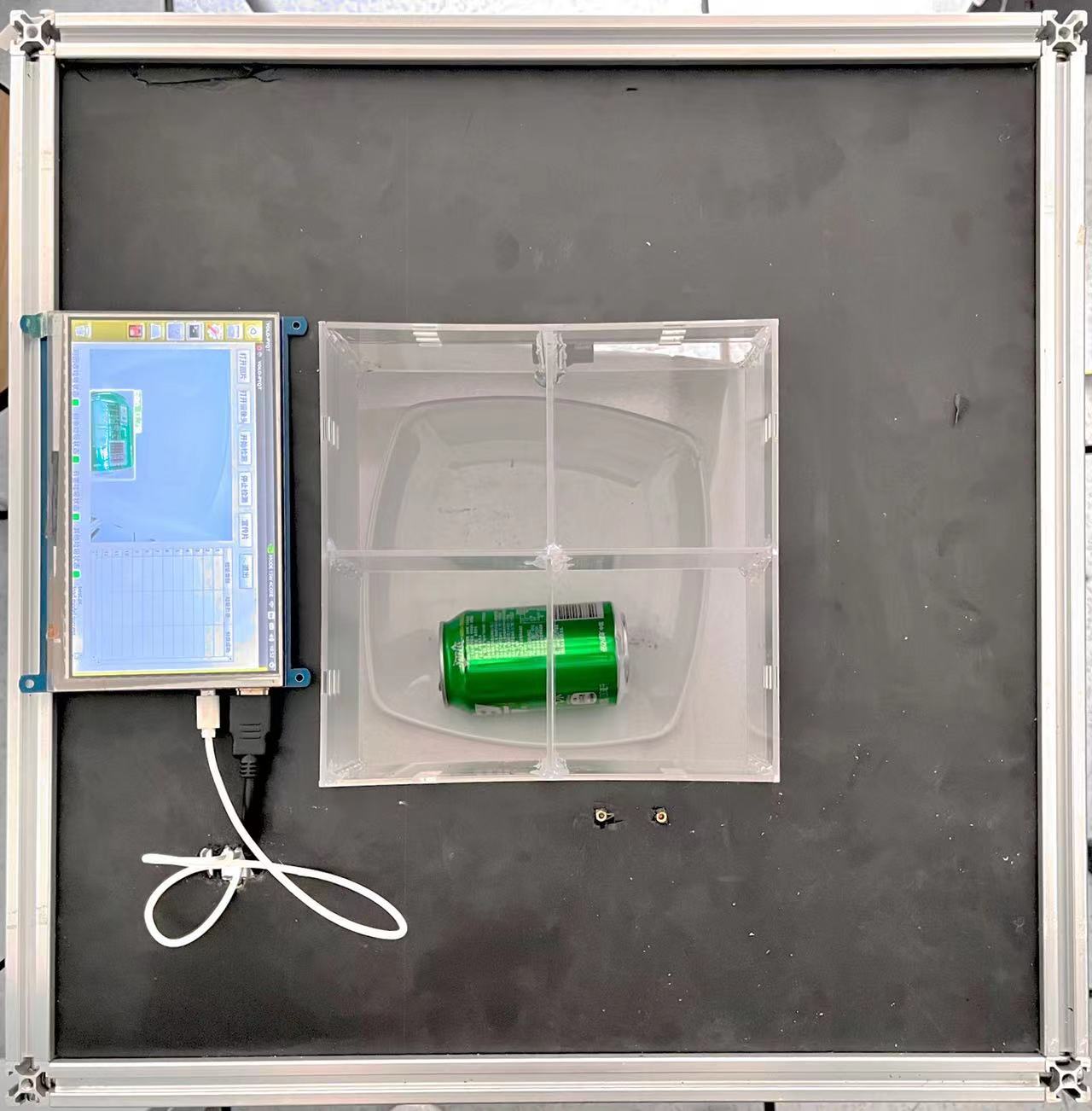
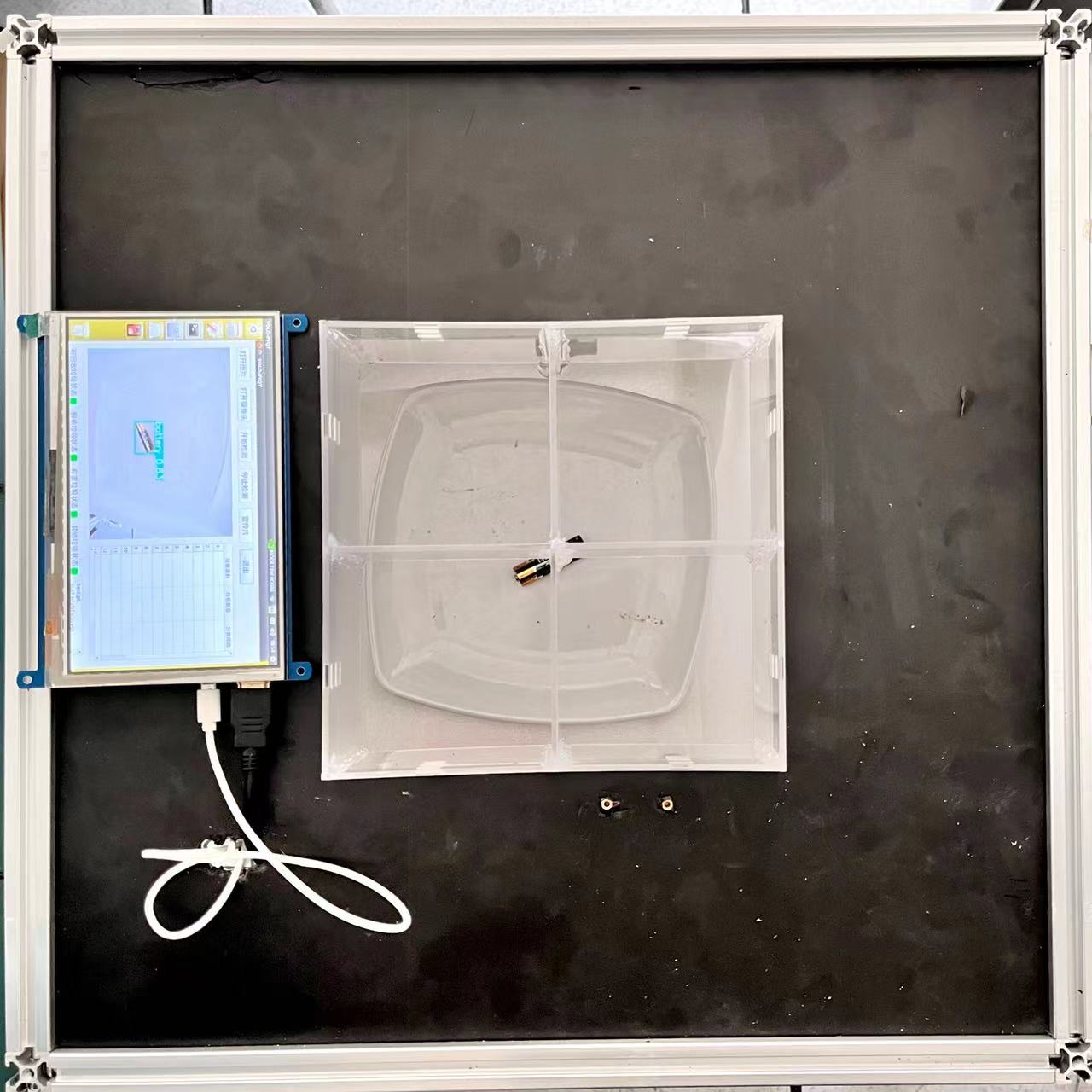
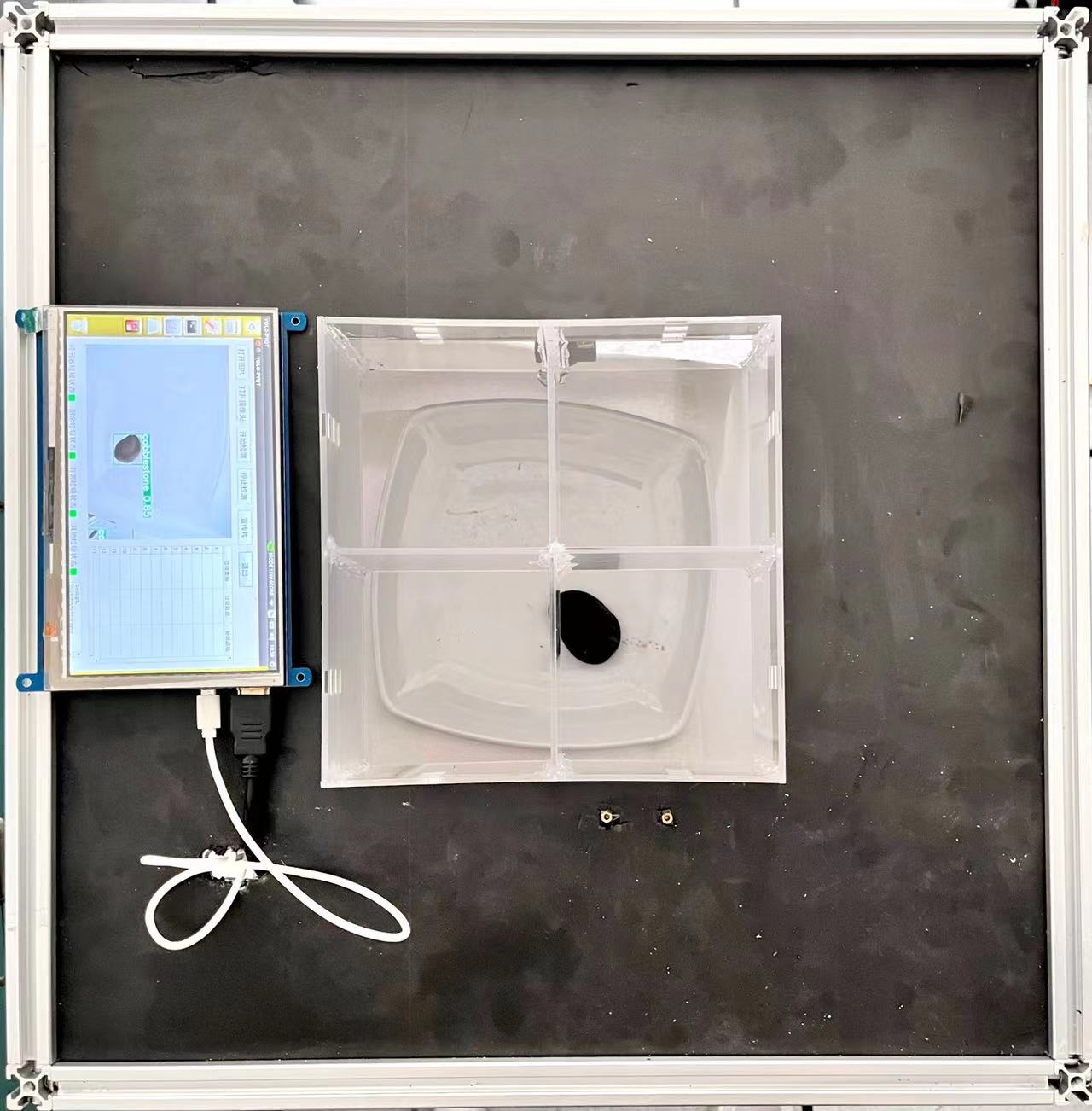
The platform is based on self-designed sorting trash cans, with NVIDIA Jetson Xavier NX as the main control, based on yolov5 to realize the intelligent discrimination of four types of urban waste, equipped with a two-degree-of-freedom gimbal to realize the sorting of waste, and can handle two or more types at the same time Sorted storage of garbage. At the same time, the system is connected to a variety of peripherals, including TOF proximity sensors, display screens, etc., to complete garbage full-load detection, visualized UI interface and other functions.
Requirements
- python : 3.7.11
- torch : 1.8.0+cu111
Main body

Classification
Can
Battery

Cobblestone

Run simulation
python run_gui.py